
制御システムの概要
制御システムの概要は以下のようになっています。
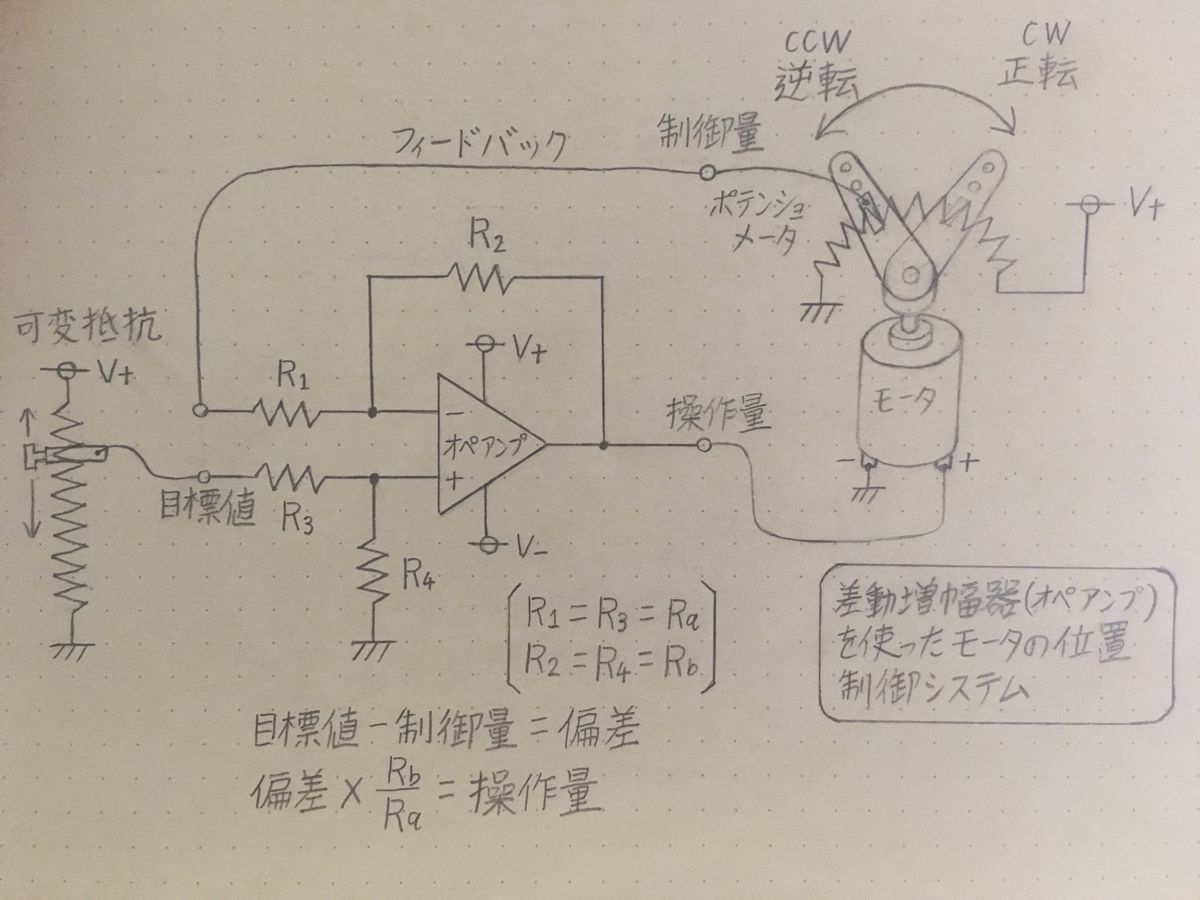
R1~R4はオペアンプで減算回路を構成しています。(減算回路はR1=R3、R2=R4、の条件で使用します。)この減算回路は可変抵抗器の電圧(目標値)から、ポテンショメータの電圧(制御量)を引き算した値(偏差)に(R1/R2)の値(ゲイン)を掛け算した値を出力します。
減算回路の出力がそのままモーターへの出力電圧(操作量)となっています。制御量が目標値に達していないときは減算回路からモーターへプラスの電圧がかかるので、モーターは正転方向(時計回り)に回転します。逆に制御量が目標値を追い越したときは減算回路からモーターへマイナスの電圧がかかるので、モーターは逆転方向(反時計回り)に回転します。
一般的なオペアンプでは本来、モーターを直接駆動させるほどの大電流を流すことはできないのですが、この実験ではTA7272Pという大電流を流せるオペアンプを使っているので1つのオペアンプだけでシステムを構築することができました。TA7272PというICは少し古いICなので今では手に入れることが難しいかもしれません。TA7272Pでなくてもパワーオペアンプに区分されるICなら同じような使い方ができると思います。例えば秋月電子通商さんでは以下のようなパワーオペアンプを取り扱っています。
http://akizukidenshi.com/catalog/g/gI-00065/
動画内の最初の実験では抵抗値がR1=R3=Rbが22kΩで、R2=R4=Raが1kΩの抵抗値を使用しています。続いてゲインを少し下げた状態での実験ではR2=R4=Raは1kΩのままで、R1=R3=Rbが4.7kΩになっています。そして最後のゲインを上げた状態での実験ではR2=R4=Raは1kΩのままで、R1=R3=Rbが51kΩになっています。