


市販されている部品で流用できるものも探しましたが、ゴム栓はなぜか2穴で6号サイズ(ペットボトルの適合サイズ)のものがなく、その他の2つの口を持つボトルキャップのような部品も特殊な用途のためか価格が非常に高く、ペットボトルロケットには使用できませんでした。
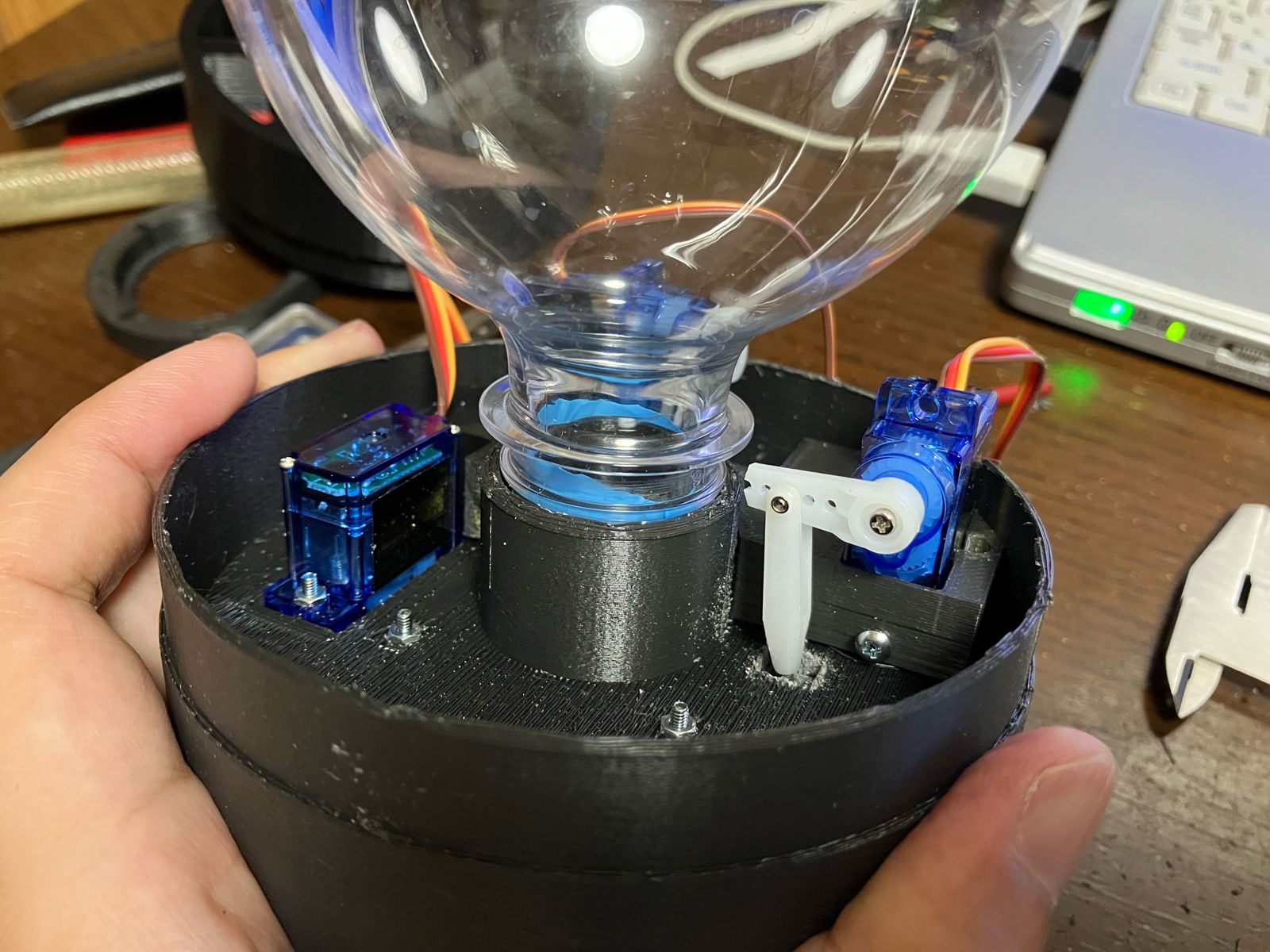
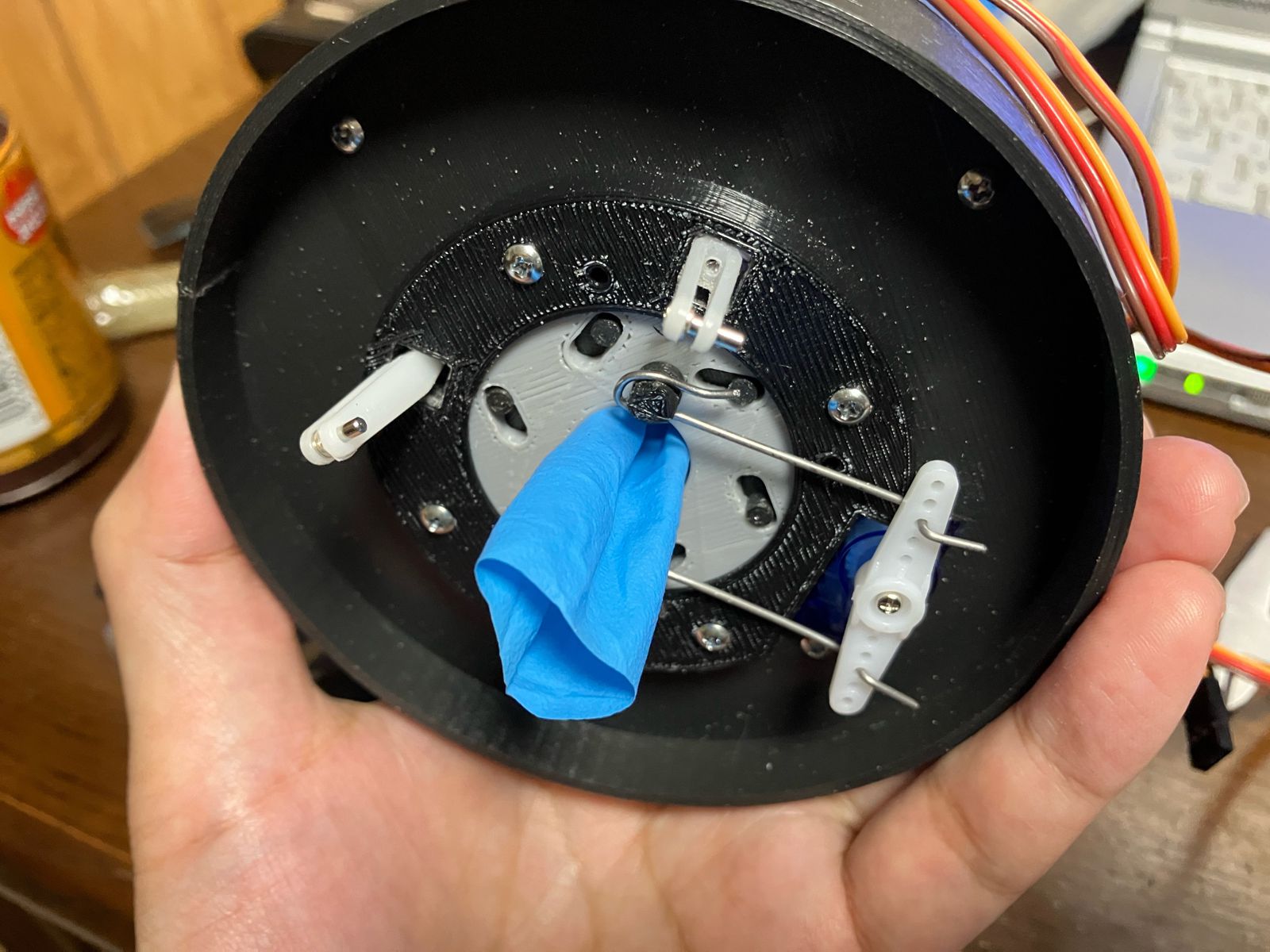
上記の理由でペットボトルの連結方法について長い間悩んでいましたが、ふとした瞬間に「1つ穴のゴム栓にエアチューブを接続し、ボトルの外側で分岐させればよい」と気づきました。そこで作成したのが以下の連結具です。簡単に作成でき、タンク内の圧力が上がっても空気漏れが起きません。ゴム栓が外れないように固定するボトルキャップは3Dプリンターで作成しています。

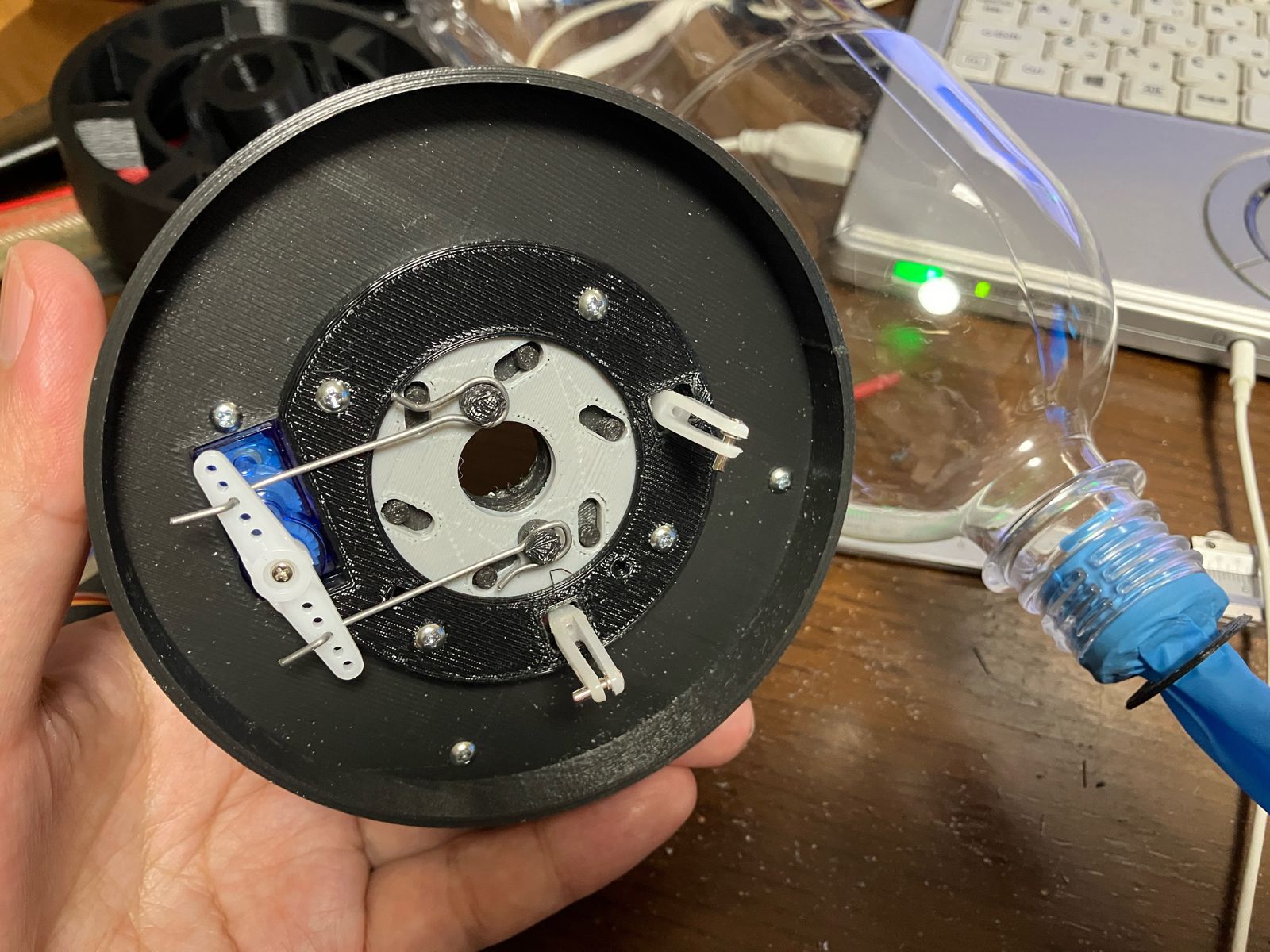
【2024年6月11日追記】 エアタンク用バルブの動作実験の様子を公開しました。当初は一般的な電磁バルブを使用する予定でしたが、安価に入手可能な電磁バルブは重く、12V電源で駆動するものしか入手できなかったため、小型の機械式バルブをサーボモータで開閉する方法に切り替えました。
【2024年6月22日追記】 第1号試験機の動作実験の様子を公開しました。1号試験機は全体の機能を完成させることを優先した継ぎ接ぎの機体で、軽量化への対策が十分ではなく、機体重量が重過ぎたために20cm程度機体を浮き上がらせるだけでエンジンのエネルギーを使い切ってしまいました。
最終的な機体重量は約1170g(水タンクが空の状態で)、空気タンクの圧縮空気は500kPaまで上げました。水タンクの容量は1.5リットル、空気タンクの容量は3リットル(1.5リットルのペットボトル2本を連結)です。
アイリスバルブによる推力調整は機能しましたが、1回目のエンジン動作実験の様子を見て、エンジンの推力に余裕がないことが明らかになったため、その場で推力調整機能はOFFにし、最初から最後まで水タンクバルブは全開の状態で使用しました。1.5リットルの水タンクは1秒程度で空になり、推力を維持できたのはごくわずかな時間です。
水タンクバルブ(アイリスバルブ)は噴射口の口径を約14mm~0mmの範囲で変えることができます。(全開の状態が直径約14mmの状態です。)
第1号試験機には同志社大学DERCロケットサークルさんと共同開発したモデルロケット用の姿勢制御システムをほぼそのまま移植しています。わずかな時間ですが、動画では最初画面右側に傾いて浮き上がった機体が反対方向へ姿勢を戻す動きが確認できました。
【2024年8月5日追記】 第1号試験機の失敗を受け、1号試験機を小型軽量化した2号試験機の開発を進めています。1170gあった機体重量を850gまで軽量化し、軽量化の効果を確認するための噴射実験を行いました。
1号試験機はエンジン始動後もしばらく機体が持ち上がらず、水タンク内の水がほとんど空になってからわずかな時間だけ機体が宙に浮く状態でしたが、2号試験機はエンジン始動後すぐに機体が持ち上がり、約1.2秒ほど機体を浮かせることができました。モデルロケットでの姿勢制御実験ではエンジンの燃焼時間が1.8秒程度あったので、もう少し水タンクのバルブを絞って推力を維持できる時間を伸ばせればと考えています。
今回の実験に用いた2号試験機の重量(水タンク空の状態)は約850g。空気タンクの圧縮空気は500kPaまで上げました。水タンクの容量は1.5リットル、空気タンクの容量は3リットル(1.5リットルのペットボトル2本を連結)です。エンジン始動後1秒間は推力100%、その後2秒間は推力58%、その後は推力42%というプログラムでしたが、今回の実験では1.2秒ほどで水タンクが空になってしまったため、次回の実験ではもう少し早いタイミングで推力を絞るようにプログラムを変更したいと考えています。(エンジン推力は水タンクバルブの開き具合で調整しています。水タンクバルブ(アイリスバルブ)は噴射口の口径を約14mm~0mmの範囲で変えることができます。全開の状態が直径約14mmの状態です。)
今回の実験では噴射の勢いでジンバルが破損するトラブルがありました。2号試験機のジンバル部はほぼモデルロケットに用いたジンバルをそのまま流用していますが、モデルロケットとペットボトルロケットではジンバルが受ける力の向きが反対になるため、ベアリングの固定具の付く方向(力が加わると固定具が外れてしまう方向)を逆にする必要があることに気づきました。(モデルロケットではジンバルにエンジンが固定されているため、ジンバルにはエンジンからの上向きの力が加わります。対してペットボトルロケットでは噴射された水をジンバルに固定されたノズルに当てて推力偏向するため、ジンバルには噴射口からの下向きの力が加わります。)ジンバル部の構造については今後改良したいと思います。
今回の実験で、2号試験機はエンジン始動直後から機体を持ち上げる性能があることが確認できました。1号試験機からの軽量化の効果が出ているようです。少なくとも1.2秒間は重力に逆らって機体を加速できたので、打ち上げればそれなりに飛ぶのではないかと期待しています。次回は実際に2号試験機の打ち上げ実験ができればと考えています。
【2024年10月10日追記】 サイトの更新が遅くなってしまいましたが、8月10日に行った第2号試験機の打ち上げ実験について書きたいと思います。
2号機は1号機に比べて320gも軽く作ったのですが、それでも思ったほどの高度は出ませんでした。目視でのおおよその推定ですが、機体が持ち上がったのはせいぜい高度1~2m程度だったと思います。どうやらペットボトルロケットの重量制限をかなり甘く見積もっていたようです。推力偏向やバルブ制御などの機構は思っていたよりもすんなりと動作してくれたのですが、まさかロケットの軽量化にここまで苦戦するとは思っていませんでした。
もっとロケットらしく飛ばすためには構造を根本から見直し、大幅な軽量化を果たす必要があるようです。
現在、更なる軽量化を目指した3号機の開発を進めています。進捗あり次第またここで報告させていただきます。
【2025年4月1日追記】3号機の噴射実験および打上実験について。
2号機の高度が思ったほど伸びなかったことから、更なる軽量化のためにはロケットの構造自体を大幅に変更する必要があるとの考えに至りました。そこで3号機では2本あった空気タンクを1本に減らし、減速用のパラシュート機構も思い切って省くことにしました。その代わりに着陸寸前に2度目の噴射を行い、着地の衝撃を和らげる作戦です。これなら可変推力の有用性を発揮できる上に重いパラシュート機構を載せる必要がなくなるのでとても良いアイデアだと、当時は思いました。
完成した3号機のスペックは以下の通りです。
機体重量(水タンク空):475g
空気タンク:1.5L
水タンク:1.5L
圧縮空気圧力:500kPa
以下は完成した3号機の第1回目の噴射実験です。
噴射時間をできるだけ長く取りたかったためにエンジンの出力を絞り過ぎてしまい、機体が全く持ち上がらない状態となってしまいました。この後少しずつエンジンの出力設定を上げていき、ぎりぎり機体が持ち上がるよう調整した状態が以下になります。
エンジン出力を上げたことで機体は持ち上がるようになりましたがその分噴射時間は短くなってしまいました。噴射時間は約1.5秒でこれは2号機の噴射時間とほぼ同じです。
この時点で、当初計画していた減速のための2回目の噴射を行う余裕が無いことが感覚的に分かりました。なので1回目の噴射でほとんどの燃料(水)を使い切るようにプログラムの設定を書き直しました。一応の動作確認目的で2回目の噴射はタンク内に残された圧縮空気のみで行うようにしました。(この段階ではまだ圧縮空気のみの噴射でもある程度は落下速度を落とせるのではないかと考えていました)
また、空気タンクが1本になったことで水量の減少に伴う圧縮空気の圧力低下が大きくなったように思えたので、この実験からは圧縮空気圧力を600kPaまで上げることにしました。圧力変更後の3号機のスペックは以下になります。
機体重量(水タンク空):475g
空気タンク:1.5L
水タンク:1.5L
圧縮空気圧力:600kPa
そして2025年3月31日に行った3号機の打ち上げ実験の様子が以下になります。
この日初めて推力偏向による姿勢制御をペットボトルロケットで実現する事ができました。私の知る限りペットボトルロケットでこれを実現した事例は今まで1例もないと思います。
とは言え、できればもう少し高度が欲しいという事と、あと、2回目の噴射はほとんど減速効果が無かったので、やはりパラシュート機構は必要だという考えに至りました。(動画内の音をよく聞いてもらうと、着陸直前に2回目の噴射の音が録音されているのが分かると思います。)
また、姿勢制御の完成度もまだ低く、姿勢が左右に大きく振れているのが確認できます。
今後も更なる軽量化と、パラシュート機構の実装および制御特性の改善を目指して改良を続けていきたいと思います。