




ここまでの説明で「なぜ最初からデジタルICの出力インピーダンスを低くなるように作らないのだろう?」という疑問を持たれる方もいるかもしれません。確かにマイコンなどの出力端子が低い出力インピーダンスになるように作られていれば、直接モーターを接続してON/OFF制御などができるはずです。もしくは「モーターの入力インピーダンスが高ければ良いのに」と考える方もいるかもしれませんね。
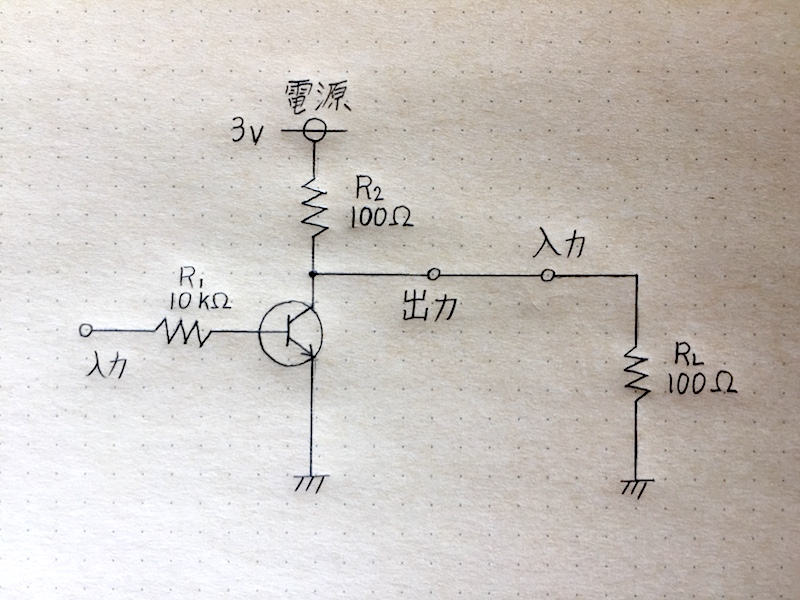
まず最初に出てきたNOT演算回路ですが、例えばこの回路のR2抵抗が100Ωではなく1Ωであったとしたらどうでしょうか。

この場合、確かに出力インピーダンスは低くなるのですが、出力信号がLow電圧に切り替わるたびに3V ÷ 1Ωで3Aもの電流が流れることになってしまいます。元の回路が30mAで動作するのに対して、R2が1Ωの回路はとても消費電力の大きい回路です。さらにトランジスタに大きな電流を流そうと思えば、その分トランジスタの面積を大きくしなければなりません。消費電力が高く、サイズの大きい回路は経済的ではないので作られないのです。
モーターの入力インピーダンスを高くするという案の方はどうでしょうか。モーターの入力インピーダンスを高くした場合、確かに端子電圧の低下は起こりません。しかし同時にモーター内で磁界を発生させるために必要な電流がほとんど流れていかないために、回転トルクが極めて低いモーターになってしまうでしょう。
大きな電流を流す必要がある回路の入出力インピーダンスは低く、逆に大電流を必要としない回路の入出力インピーダンスは高くなるように作られています。デジタルICはHighかLowかと言った「情報」さえ次の回路に伝えられれば良く、経済性の面からあまり大きな電流を流せるように作られていません。逆に電池やモーター、電球と言った、電気エネルギーを運動エネルギーや光のエネルギーなどに変換するために作られた部品は、大きな電流を流せるように作らなければそもそもの役割を果たすことができません。これは回路の目的が情報の伝達にあるのか、エネルギーの伝達にあるのかの違いになります。
また、ここまでの解説で500mAという数値が電子工作の世界ではかなり大きな電流として扱われると言うことが、感覚的にもお伝えできたのではないかと思います。なので最初のページで書いた1Aという電流は電子工作の世界では相当大きな電流と言うことになります。
このような大電流を必要とするモーターや電球などをマイコンで制御する場合には、間に「電流増幅回路」を入れて制御する必要があります。
(おまけ)インピーダンスマッチングについて
ここまでの話で「出力インピーダンスの低さ」はその回路が持っている電流を流す能力を示している事、また回路同士を接続した時には接続点での電位が下がる事などがわかってもらえたと思います。なので基本的に出力インピーダンスは低い方が良くて、入力インピーダンスは高い方が良いのだと思われるかもしれません。
基本的には回路の接続は「低い出力インピーダンスで出して、高い入力インピーダンスで受ける。」と覚えてもらって構わないです。特に簡単な電子工作をする分にはこの考え方だけでも困ることはないと思いますが、低いインピーダンスで出して高いインピーダンスで受けるというのが全てだと考えていると、後々出てくる「インピーダンスマッチング(インピーダンス整合)」という考え方に出会った時に混乱してしまいます。(学生時代の私がそうでした。)
確かに回路接続の目的が電圧波形という「情報」の伝達にある場合には「低い出力インピーダンスで出して、高い入力インピーダンスで受ける。」という考え方でも問題ありません。ただ回路接続の目的が「電力」の伝送にある場合にはこの考え方だけではまずいことになります。
「情報」の伝達が目的の回路というのは例えばデジタル回路の接続などがそれにあたります。デジタル回路は電圧が「High」か「Low」といった「情報」さえ次の回路に伝われば役目を果たす事ができます。それに対して「電力」の伝送が目的の回路というのはモーターや電球、スピーカーなどです。
例えば上記の説明でも例に出したモーターですが、モーターの入力インピーダンスが高いと端子での電圧降下は少なくなりますが、その分モーターに流れ込む電流が少なくなってしまうので肝心の回転エネルギー(電力)が得られない、という話を上でもしました。仮にこのモーターの入力インピーダンスを自由に決めれたと仮定した場合に、モーター側の入力インピーダンスがいくらの時に最大の電力が得られるかを考えて見ましょう。
(※実際に単純なDCモーターを回すときにインピーダンスマッチングについて考えることはほとんどありません。モーターに電圧をかける側の回路の出力インピーダンスが十分低い(モーターを回すのに必要なだけの電流を流す能力がある)ことさえ確認できていれば問題ありません。)
以下のように出力インピーダンスがr[Ω]である電池に、入力インピーダンスがx[Ω]のモーターが接続されていると仮定します。

上図のモーターで消費される電力は以下の計算式で求められます。

このとき、モーターの入力インピーダンス「x」をいくらにすればモーターで消費される電力PRLが最大になるかを考えてみます。ここからは高校数学で習う微分を使った関数の最大値、最小値を求める問題になります。

上記の通り、モーターの入力インピーダンス「x」は電池の出力インピーダンス「r」と同じ値になった時に電力が最大になることが分かりました。
”出力インピーダンス=入力インピーダンス”の関係になった時に伝送される電力は最大になります。これが「インピーダンスマッチング(インピーダンス整合)」という考え方です。ですので回路同士を接続する際、接続の目的が「情報」の伝達にある場合には「低い出力インピーダンスで出して、高い入力インピーダンスで受ける。」のが良く、接続の目的が「電力」の伝送にある場合には「出力インピーダンスと入力インピーダンスを同じにする」のが良い、ということになります。
実際にインピーダンスマッチングの考え方が必要になるのは、微弱な信号をできるだけ損失の少ないように扱う必要がある高周波回路などです。電子工作を始めたばかりの段階でインピーダンスマッチングの考え方が必要になることはほとんどないと思いますが、概要だけでも知っておくと後々の学習に役に立つと思います。